
Keynote Speakers
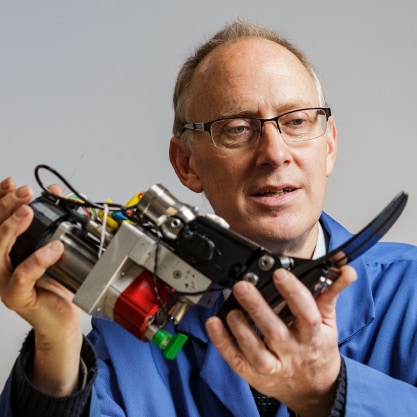
Andrew Plummer
Professor of Machine Systems, University of Bath, UK
Andrew Plummer is Director of the Centre for Power Transmission and Motion Control at the University of Bath, UK, and also Head of the Mechanical Engineering Department. He has a variety of research interests in the field of motion and force control, including inverse-model based control of electrohydraulic servosystems, digital fluid power, model-in-the-loop testing systems, hybrid hydraulic/piezoelectric actuation, and active vehicle control. He received his Ph.D from the University of Bath in 1991, for research into control of electro-hydraulic systems. He worked as a research engineer for Thales from 1990, developing flight simulator control technology, before joining the University of Leeds in 1994. From 1999 he was global control systems R&D manager for Instron, manufacturers of materials and structural testing systems, developing high performance electrohydraulic machines including crash-testing catapults, Formula One racing car test rigs, and earthquake simulation tables. Professor Plummer was appointed to his present position in 2006. The Centre for Power Transmission and Motion Control at Bath, founded in 1968, has an international reputation as a centre of excellence in hydraulics, mechanical power transmission and motion control systems, with applications in the aerospace, automotive, robotics and renewable energy sectors amongst others. Professor Plummer has chaired the UK Automatic Control Council, the IMechE Mechatronics Informatics and Control Group, and is Chair of the Global Fluid Power Society.
ANDREW PLUMMER: Integrated hydromechatronic actuators
Using the opportunities provided by additive manufacture, advanced high performance electrohydraulic actuators are emerging which exhibit tightly-integrated sensing, control and power stages. Not only do these provide excellent power density and dynamic response, but the potential for robust control and health monitoring built on their embedded sensing capability. In this talk, I will review the pros and cons of traditional hydraulic actuation and discuss concepts for improved performance. A key challenge is the poor energy efficiency of hydraulic actuators controlled by throttling valves, but this can be overcome by using servomotor driven pumps (as in Electrohydrostatic Actuators, EHAs), or digital hydraulic architectures such as those using high-speed switching valves. Whichever architecture is used, merging the separate parts into one structural unit gives enormous benefits in terms of compactness, reliability, reduced part count, and improved dynamic performance. Additive manufacture (AM) is the key to this integration, as it allows hydraulic components with complex internal galleries to be made without the constrains of line-of-sight machining, and dramatically reduces weight and material waste. Critically, AM also promises a much shorter development cycle. I will present examples of AM hydromechatronic actuators designed for aerospace, and also for robotic and medical applications (prostheses) where the new approach has generated smaller scale devices than are normally associated with hydraulics.
Marcel Heertjes
Department of Mechanical Engineering, Eindhoven University of Technology
Marcel Heertjes received the M.Sc. and Ph.D. degrees from the Eindhoven University of Technology, Eindhoven, The Netherlands, in 1995 and 1999, respectively. After being with the Philips Center for Industrial Technology from 2000-2005, he joined ASML in 2006. He was a recipient of the IEEE Control Systems Technology Award 2015 for variable gain control and its applications to wafer scanners.
In 2019, he was appointed (part-time) full Professor on Industrial Nonlinear Control for High-Precision Systems at Eindhoven University of Technology. He acts as an Associate Editor for IFAC Mechatronics since 2016. His main interests are with hybrid integrator-gain systems, learning based control, and industrial mechatronics & motion control.
MARCEL HEERTJES: Hybrid Integrator-Gain System: how to obtain scanning accuracy at nanoscale with unstable controller modes?
Wafer scanners are complex lithography machines that are critical to the production of integrated circuits. Driven by improved performance in terms of throughput, overlay, and imaging, the control design of wafer scanners is part of its success. Inherent design limitations like the waterbed effect, however, pose constraints on the ever-increasing demand for improved control specifications and as such provide the motivation to explore nonlinear strategies. For the fast positioning stages of a wafer scanner a typical example is given by the recent developments in hybrid integrator-gain systems (HIGS). Such systems operate alternately in integrator mode or in gain mode as to exploit phase benefits. Unlike, for example, reset control approaches with (partial) state resets, HIGS does not produce discontinuous control signals. This is particularly useful when dealing with weakly damped resonances of the wafer scanner. In the plenary lecture, an industrial nonlinear control perspective will be discussed that includes the ability to surpass inherent design limitations as well as the recent developments in time- and frequency-domain stability tools, robust nonlinear control design/considerations, and demonstrations together with the encountered pitfalls the come along when bringing nonlinear motion control to practice.

Valeriy Vyatkin
Aalto University, Finland & Luleå University of Technology, Sweden
Valeriy Vyatkin (IEEE Fellow) is Professor of Information and Computer Engineering in Automation at Aalto University, Finland on joint appointment as Chaired Professor (Ämnesföreträdare) of Dependable Computation and Communication Systems, Luleå University of Technology, Luleå, Sweden. He has been leading research projects related to software and systems engineering for cyber-physical automation systems, intelligent energy, logistics and transportation, addressing such aspects as dependability, distributed architectures and multi-agent systems applied in various industry sectors: SmartGrid, material handling, building management systems and reconfigurable manufacturing, funded by the National Science Foundation (USA), Vettenskap Råd (Sweden), Academy of Sciences (Finland), various national and private agencies in Japan, Germany, New Zealand, Sweden, Finland and the EU. Valeriy is an active IEEE volunteer for about 20 years, currently serving as Vice-President for Technical Activities of Industrial Electronics Society.
VALERIY VYATKIN: Cyber-Physical Engineering of Mechatronic Swarms for Flexibility of Automation Systems
This talk discusses the concept of cyber-physical engineering (CPE) for the study and design of flexible automation systems composed of smart autonomous cyber-physical components (CPC). In such systems, flexibility and adaptivity is achieved on account of autonomy of the CPCs collaboratively exhibiting emergent behaviour in response for various disturbances in various domains: physical, cyber, societal and market. Wireless communication is just one of the factors complicating assurance of dependable behaviour of such mechatronic swarms, therefore new engineering methods are required. The principle of cyber-physical engineering, discussed in this talk, assumes the use of languages and tools for interdisciplinary modelling at all stages of systems’ design, analysis and operation.
